3 天涨星 1835,PLFM_RADAR:一个把相控阵雷达开源到 PCB、FPGA 和 GUI 的硬核项目
- AI 工具拆解
- 2026-03-16
- 25热度
- 0评论
很多 GitHub 爆款项目,热度来得快,价值也消得快。
但 PLFM_RADAR 不太一样。它不是“又一个 AI 套壳”,而是把 10.5GHz 开源相控阵雷达从硬件、波束控制、FPGA 信号处理到 Python GUI,整套摊在仓库里。更夸张的是,这个仓库 3 月 8 日才创建,最近 3 天就涨了 1835 Star,而且当天还在持续合并 PR。
真正稀缺的,不是“有人讲雷达”,而是“有人把能做出来的那一整套工程细节放出来”。
项目卡片
- 项目名:PLFM_RADAR(AERIS-10)
- GitHub:https://github.com/NawfalMotii79/PLFM_RADAR
- 涨星速度:最近 3 天涨星 1835,热度非常猛
- 一句话判断:这不是给你周末随手拼着玩的玩具,而是一套认真到 PCB、MCU、FPGA、GUI 全都开源出来的相控阵雷达实验平台。
为什么这个项目值得看
先说结论:它最值得看的地方,不是“开源雷达”这四个字,而是工程栈够完整。
README 里写得很直白:这套系统给了两种版本,短程版标到 3km,扩展版标到 20km;硬件层有电源板、频率综合板、主板、功放板和天线阵列;软件层有 STM32 控制、FPGA 处理链,还有桌面 GUI。
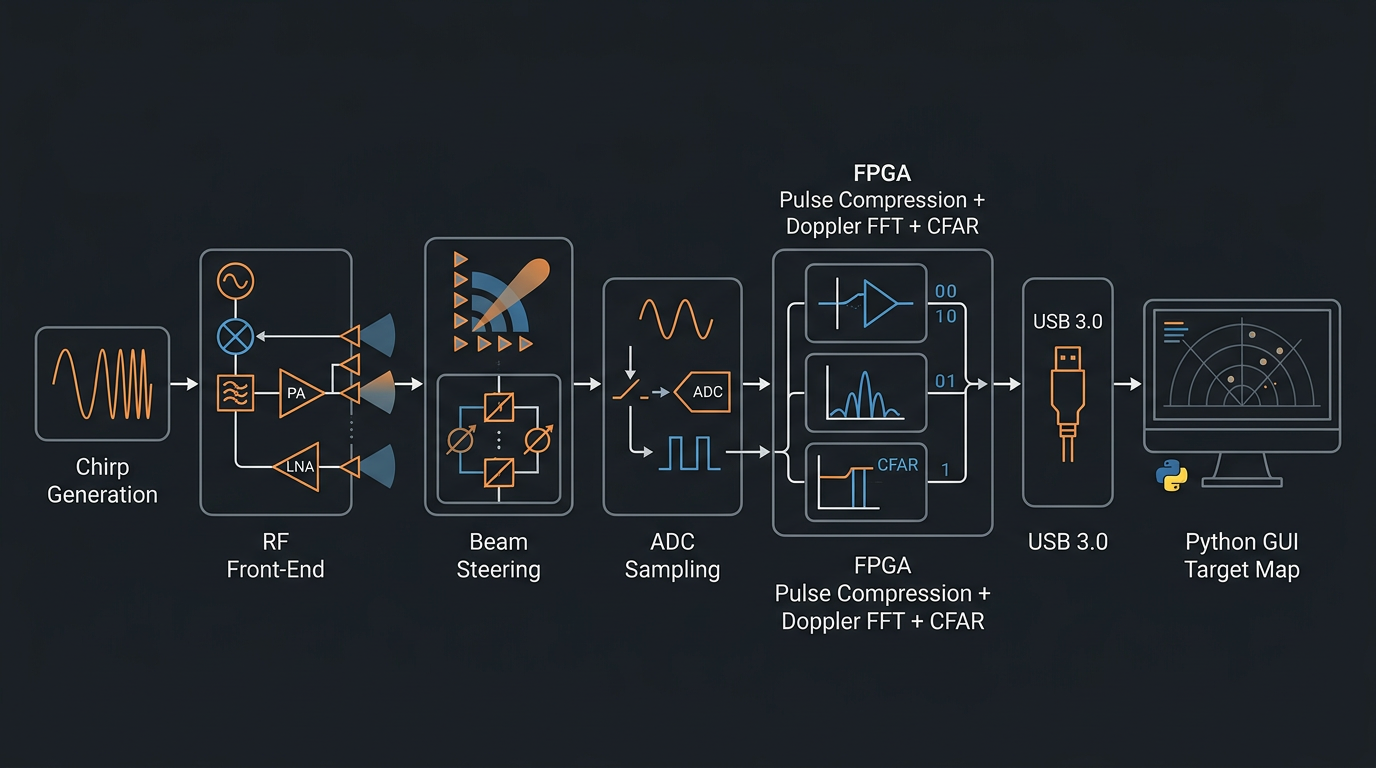
先看这张链路示意就够了:从 chirp 生成、射频前端、波束控制、ADC 采样,到 FPGA 里的 pulse compression / Doppler / CFAR,再到 USB 3.0 和 GUI,作者想开的不是某一个模块,而是一整条工程链。
再往代码里看,会更踏实。
FPGA 顶层文件 radar_system_top.v 直接把几件关键事写死了:PLFM chirp generation、ADC 接口、DDC、matched filter、Doppler processing、FT601 USB 3.0 数据传输。这不是 PPT 里的“支持某某算法”,而是模块名已经在那里。
MCU 主程序 main.cpp 也不是只做点亮 LED。里面能看到 ADAR1000、ADF4382、GPS、GY-85、BMP180、DAC5578、ADS7830 这些器件和外设管理,说明仓库作者确实在把“能转起来的一套机器”往前推。
最短上手闭环,建议你这样试
这里我要先泼一盆冷水:这个项目不适合把“跑起来”理解成 5 分钟本地体验。
因为它本质上是硬件项目。真要完整复现,你得碰 PCB、装配、射频器件、FPGA 工具链,门槛不低。
但如果你只是想判断“这个仓库到底是真货还是花架子”,最短闭环其实很清楚:
- 先读 README 和结构图,确认它公开的是完整工程,不是单一论文配套代码。
- 再看
9Firmware/92_FPGA/,重点看radar_system_top.v、doppler_processor.v、matched_filter_multi_segment.v这些文件,判断处理链是否闭合。 - 再看
9Firmware/91_Microcontroller/main.cpp,确认外设、波束控制和电源时序是不是已经接上。 - 最后看
9Firmware/93_GUI/GUI_V6.py和GUI_V6_Demo.py,前者是实机 GUI,后者是演示版,适合先理解整套人机交互怎么长。
如果你真想在本地先把 GUI 侧摸一遍,仓库虽然没给 requirements.txt,但从 GUI_V6.py 的导入可以直接看出依赖大概是这些:
这条闭环的意义不是“你已经拥有雷达”,而是先把 显示层、参数层、目标层 的逻辑看明白。对硬件项目来说,这一步很值。
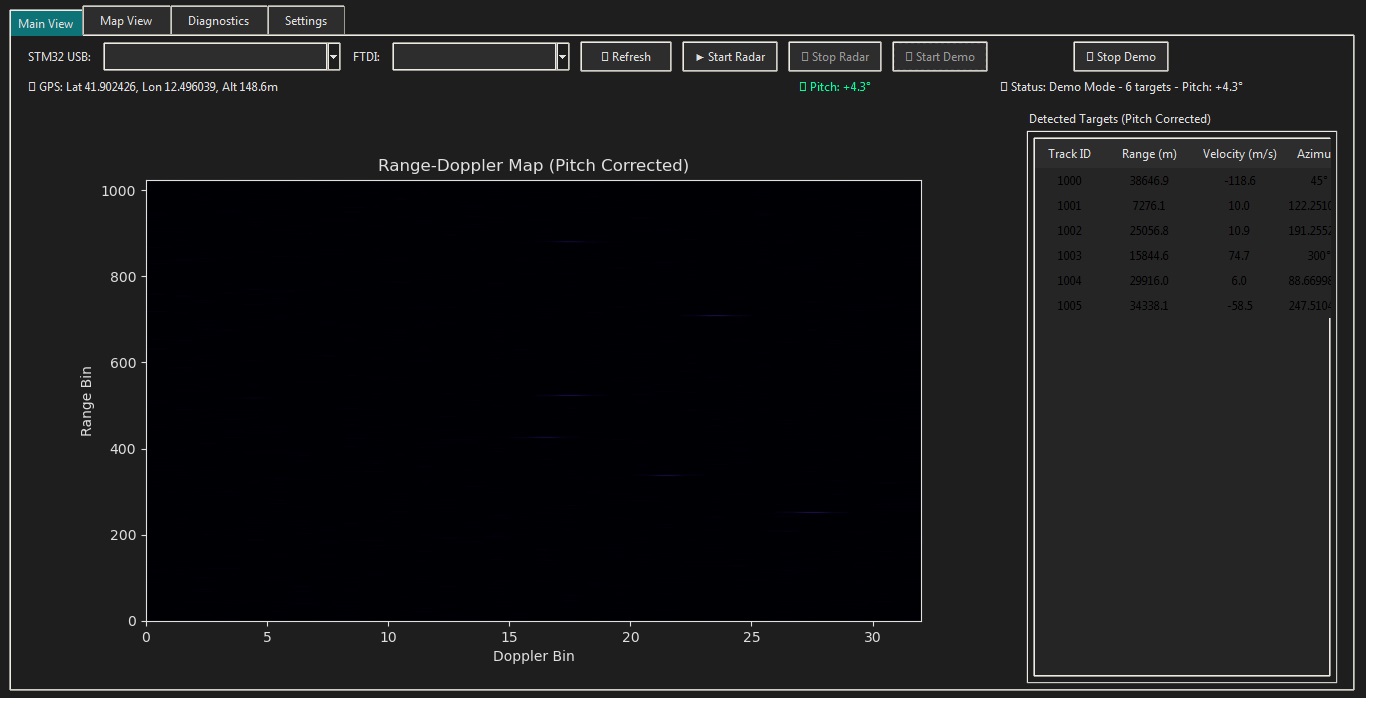
GUI 不是摆拍。仓库里既有实机版 GUI_V6,也有 Demo 版脚本;如果你还没准备好啃硬件,这是理解整套系统交互和目标展示方式的最低成本入口。
这个仓库最硬核的地方,不是参数,是“全链路开源”
很多所谓开源硬件项目,开到最后只剩几张渲染图,真正关键的地方要么没放、要么说不清。
PLFM_RADAR 这次更像是把最难藏的部分也放出来了:
- 硬件:原理图、板卡、生产文件都在
4_Schematics and Boards Layout/ - 仿真:天线、滤波器、波导、阵列模式相关内容都能找到
- 固件:STM32 侧代码不是空壳,外设管理和状态控制都有
- FPGA:不只说“做了 pulse compression”,而是把模块拆到文件级
- 上位机:GUI 直接把目标、地图、设置、USB 通信这层补齐

这张实物图最能说明问题:作者不是只在仿真里讲故事,而是已经把阵面、机箱、供电和整机工程做到了能拍出完整设备的程度。
这也是我判断它值得看的核心原因:你未必要复刻它,但你可以把它当一份非常少见的“开源相控阵雷达工程拆解样本”。
你大概率会踩的坑
先把难听话说前面,省时间。
1. 这不是低门槛 Maker 项目
README 虽然写了 low-cost,但这是相对传统相控阵雷达说的,不是相对 3D 打印小玩具。你面对的是 10.5GHz、阵列天线、功放、频综、FPGA、机械扫描和整机散热。
2. 文档比代码薄
仓库内容很多,但“从零到一复刻”的说明还不算厚。README 里提到的 10_docs/assembly_guide.md,我本地同步时并没有看到对应目录,这意味着你不能把它当成完全手把手教程。
3. 想改算法,Vivado 和数字信号处理基础躲不掉
目录里已经给到 Doppler、matched filter、DDC 等模块,但这也意味着:你如果想改参数、改链路、改时序,最好真的懂这些东西,而不是只会跑 Python。
适合谁,不适合谁
适合:
- 做雷达、无线电、无人机感知、射频/FPGA 方向的研究者和工程师
- 想看一套“开源硬件 + 固件 + FPGA + GUI”如何真正接起来的人
- 需要高质量工程样本做参考的人
不适合:
- 想找一个一条命令就能体验的 GitHub 新玩具的人
- 没打算碰硬件,却希望完整复刻的人
- 只想拿它当通用 AI 工具消费的人
一句话收口:如果你想找的是“马上能玩”的项目,它不合适;如果你想找的是“少见地把整条工程链摊开给你看”的开源样本,它非常值得收藏。
如果这篇对你有用,建议点个关注。我会持续把 GitHub 上值得用的 AI 工具拆成「最短上手闭环 + 坑点清单 + 可复用配置」,让你少走弯路。